Core Contributions
In-situ VR Design
Whole hand Haptic Rendering
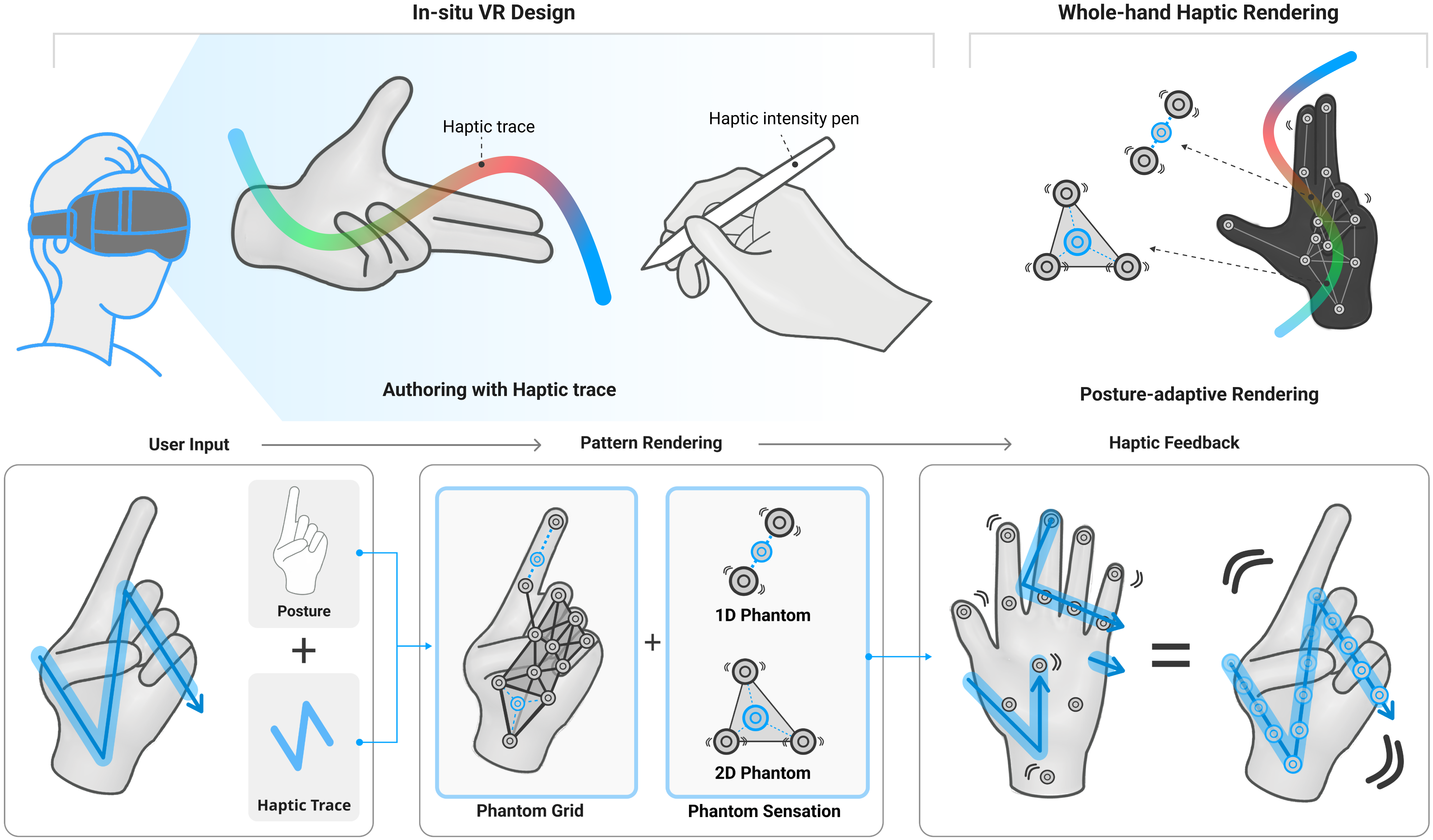
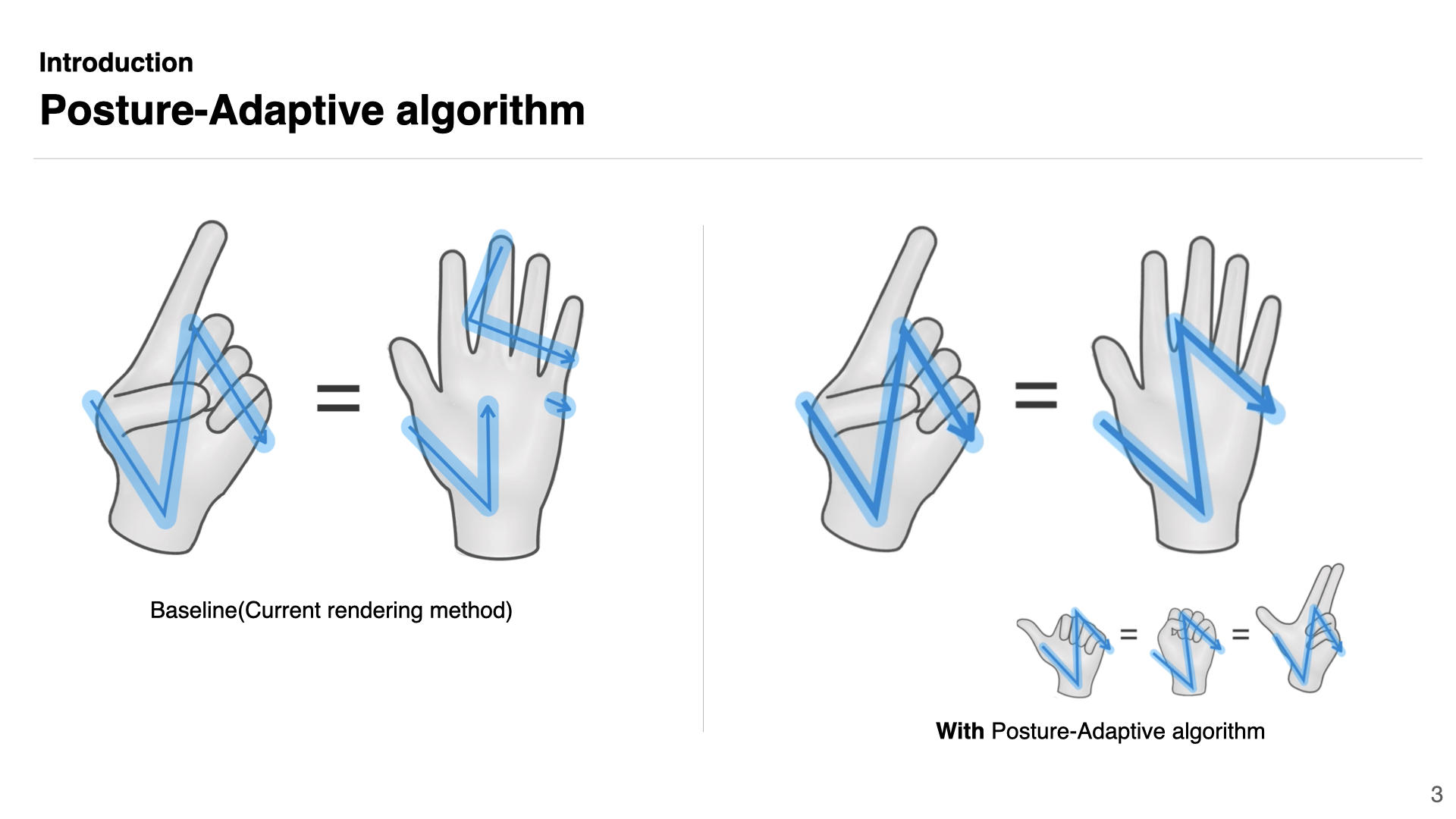
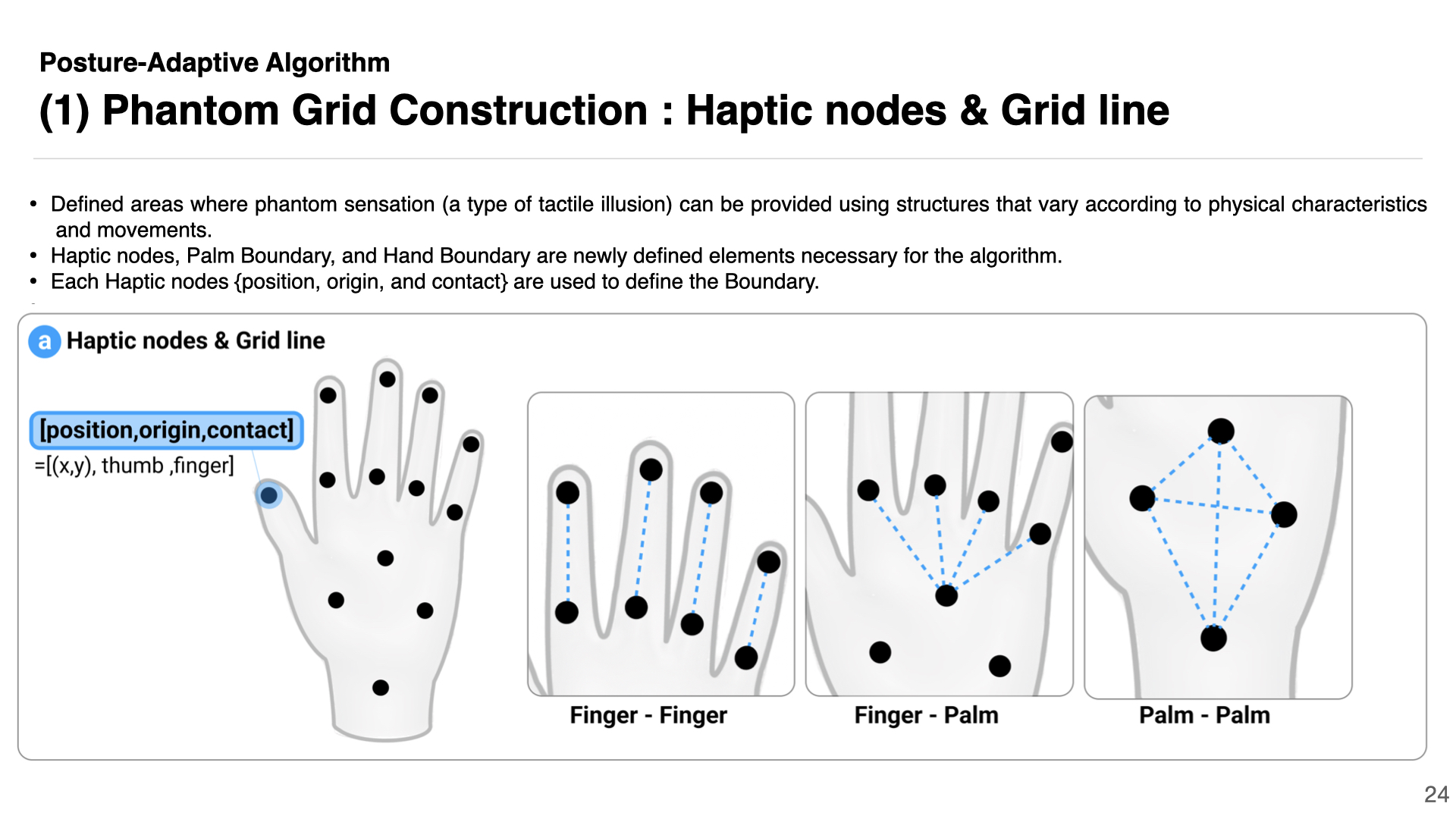
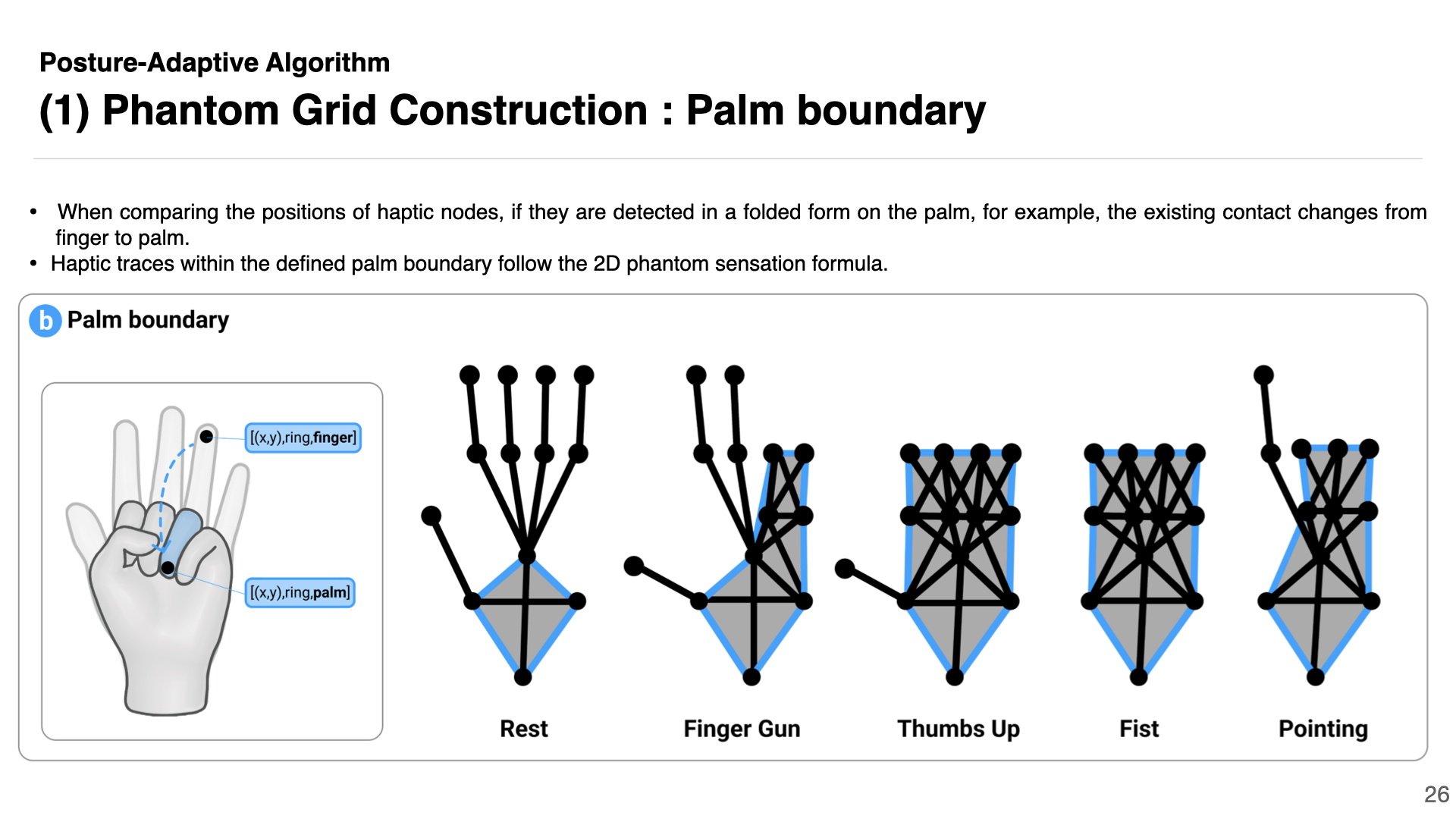
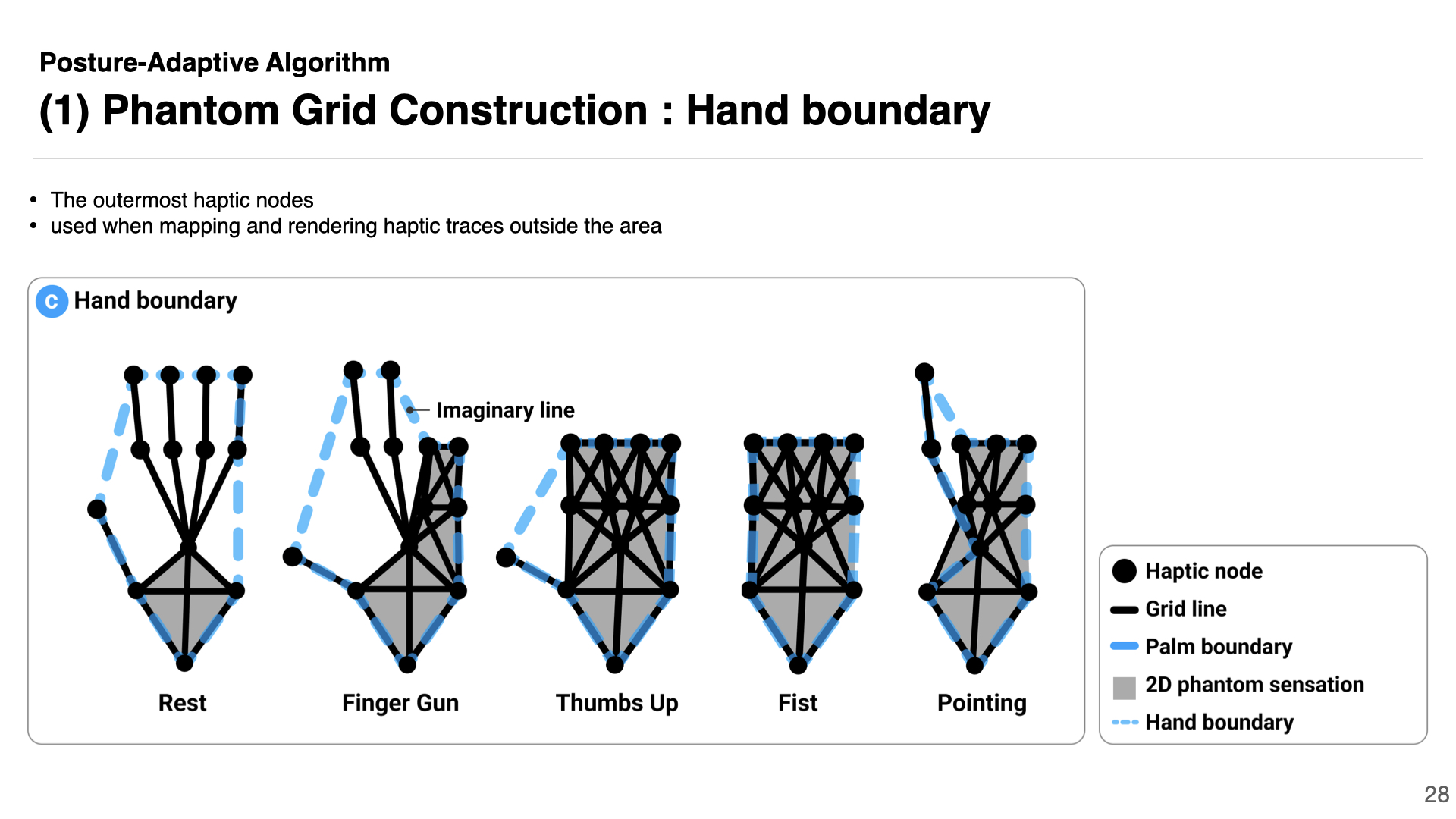
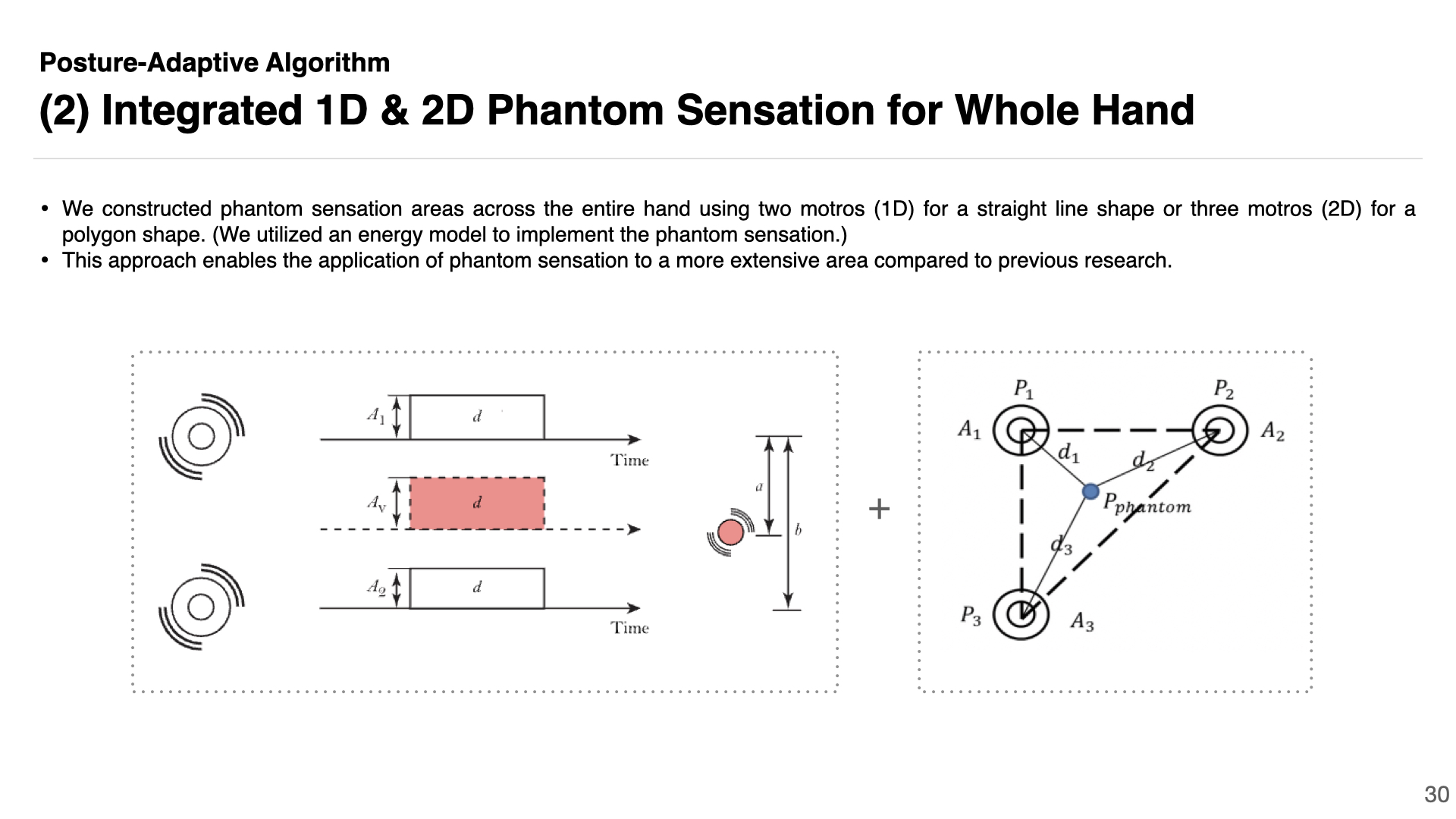
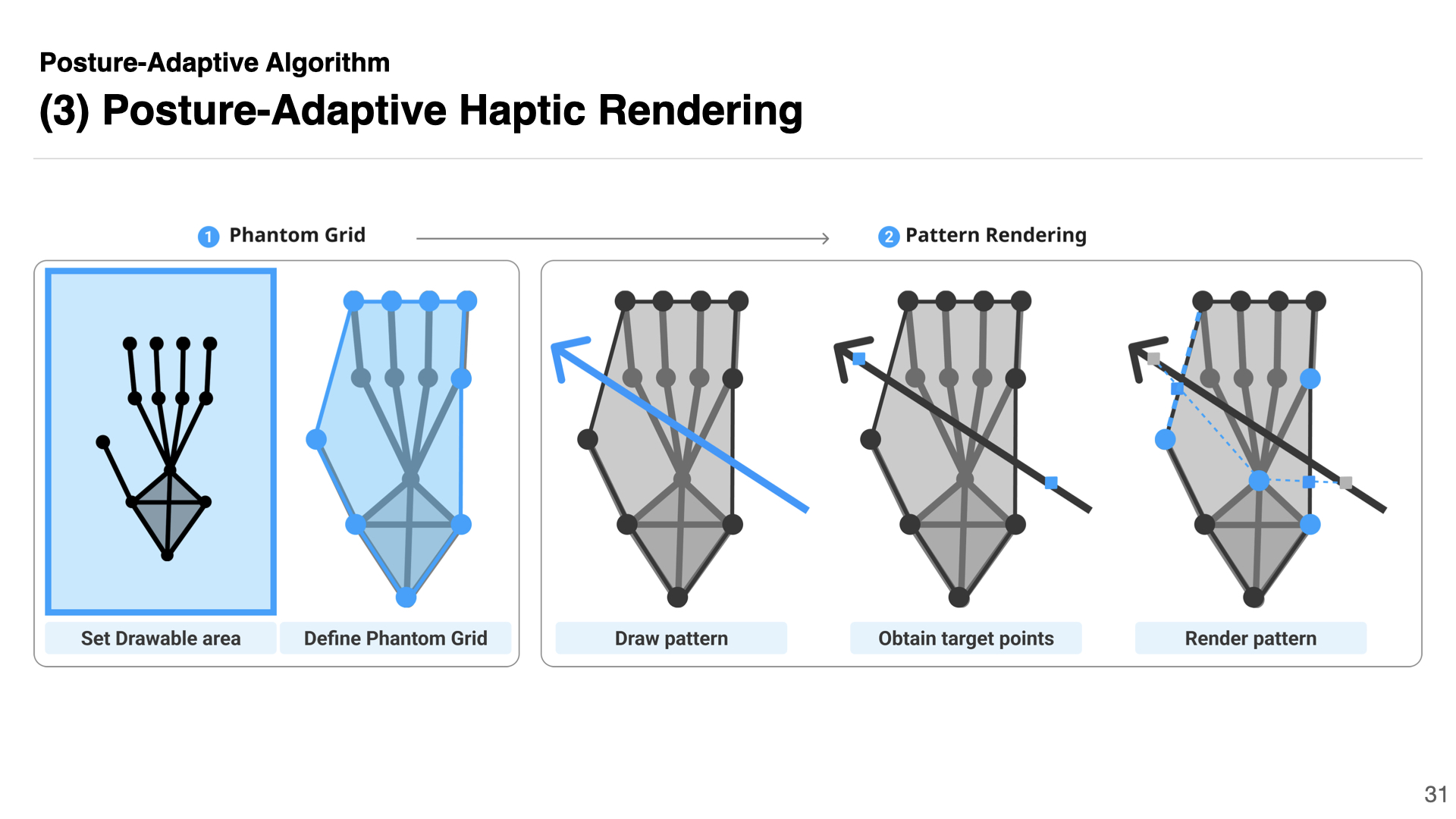
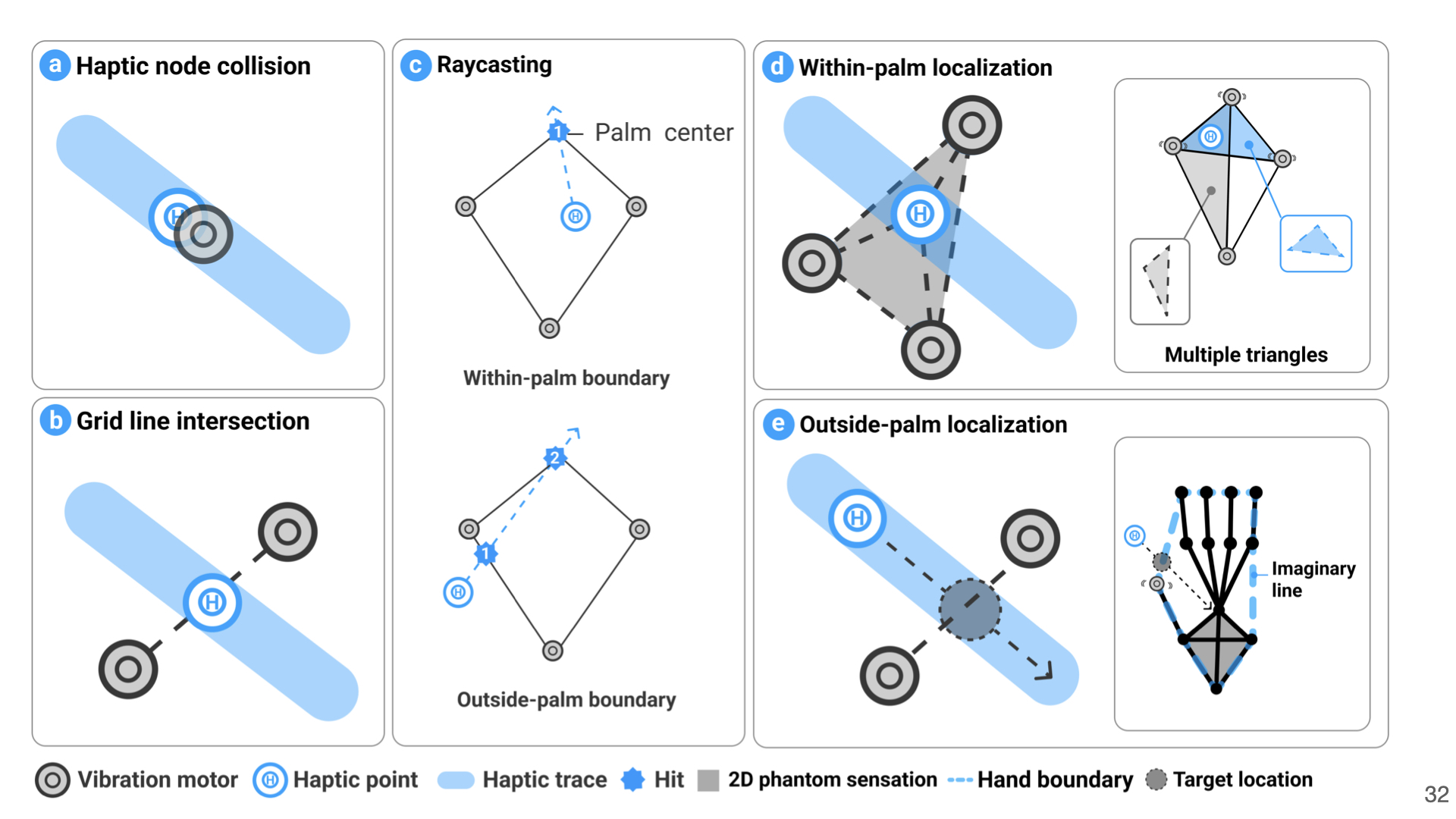
The emergence of vibrotactile feedback in hand wearables enables immersive virtual reality (VR) experience with whole-hand haptic rendering. However, existing haptic rendering neglects inconsistent sensations caused by hand postures. In our study, we observed that changing hand postures alters the distribution of vibrotactile signals which might degrade one's haptic perception. To address the issues, we present HapticPilot which allows an in-situ haptic experience design for hand wearables in VR. We developed an in-situ authoring system supporting instant haptic design. In the authoring tool, we applied our posture-adaptive haptic rendering algorithm with a novel haptic design abstraction called phantom grid. The algorithm adapts phantom grid to the target posture and incorporates 1D & 2D phantom sensation with a unique actuator arrangement to provide a whole-hand experience. With this method, HapticPilot provides a consistent haptic experience across various hand postures is available. Through measuring perceptual haptic performance and collecting qualitative feedback, we validated the usability of the system. In the end, we demonstrated our system with prospective VR scenarios showing how it enables an intuitive, empowering, and responsive haptic authoring framework.
@article{10.1145/3631453,
author = {Sung, Youjin and Kim, Rachel and Song, Kun Woo and Shao, Yitian and Yoon, Sang Ho},
title = {HapticPilot: Authoring In-situ Hand Posture-Adaptive Vibrotactile Feedback for Virtual Reality},
year = {2024},
issue_date = {December 2023},
publisher = {Association for Computing Machinery},
address = {New York, NY, USA},
volume = {7},
number = {4},
url = {https://doi.org/10.1145/3631453},
doi = {10.1145/3631453},
abstract = {The emergence of vibrotactile feedback in hand wearables enables immersive virtual reality (VR) experience with whole-hand haptic rendering. However, existing haptic rendering neglects inconsistent sensations caused by hand postures. In our study, we observed that changing hand postures alters the distribution of vibrotactile signals which might degrade one's haptic perception. To address the issues, we present HapticPilot which allows an in-situ haptic experience design for hand wearables in VR. We developed an in-situ authoring system supporting instant haptic design. In the authoring tool, we applied our posture-adaptive haptic rendering algorithm with a novel haptic design abstraction called phantom grid. The algorithm adapts phantom grid to the target posture and incorporates 1D \& 2D phantom sensation with a unique actuator arrangement to provide a whole-hand experience. With this method, HapticPilot provides a consistent haptic experience across various hand postures is available. Through measuring perceptual haptic performance and collecting qualitative feedback, we validated the usability of the system. In the end, we demonstrated our system with prospective VR scenarios showing how it enables an intuitive, empowering, and responsive haptic authoring framework.},
journal = {Proc. ACM Interact. Mob. Wearable Ubiquitous Technol.},
month = jan,
articleno = {179},
numpages = {28},
keywords = {haptic design authoring tool, haptic experience, phantom grid, posture-adaptive algorithm}
}